
南京区域GNSS导航异常事件深度技术分析报告(2025-12-17事件)
Published:
2025年12月17日傍晚,南京部分区域出现多款导航应用”定位漂移、无数据道路、共享单车/外卖定位异常”等现象。南京卫星应用行业协会在公开说明中明确将其归因于”GNSS卫星信号(含北斗、GPS)受到临时干扰压制”,并指出离线地图无法解决该问题,同时强调影响集中在民用频段、事件结束后逐步恢复。
从工程机理上看,这类”同城、同时间窗、多平台同步异常、恢复较快”的现象,最符合”区域性RF干扰导致的GNSS可用性骤降”的特征。典型表现为接收机载噪比(C/N0)下降、跟踪环失锁、PVT解算失败或降级到蜂窝/Wi-Fi粗定位。仅凭用户侧体感与App表现,无法直接判定是否存在”GNSS欺骗(spoofing)”,但本事件的主导矛盾更接近”可用性被压制”而非”被稳定牵引到错误位置”。
本报告从GNSS基本原理出发,系统梳理各GNSS系统的频点分配与抗干扰机制,深入分析干扰形式及其对用户端体验的影响,广泛收集用户反馈,并基于概率排序给出事件可能原因的技术归因。报告严格遵循工程级证据链闭环原则,提出可复现的验证方案与城市级PNT韧性加固建议。
一、GNSS定位基本原理(从信号到坐标的完整链路)
1.1 GNSS系统架构与信号传播
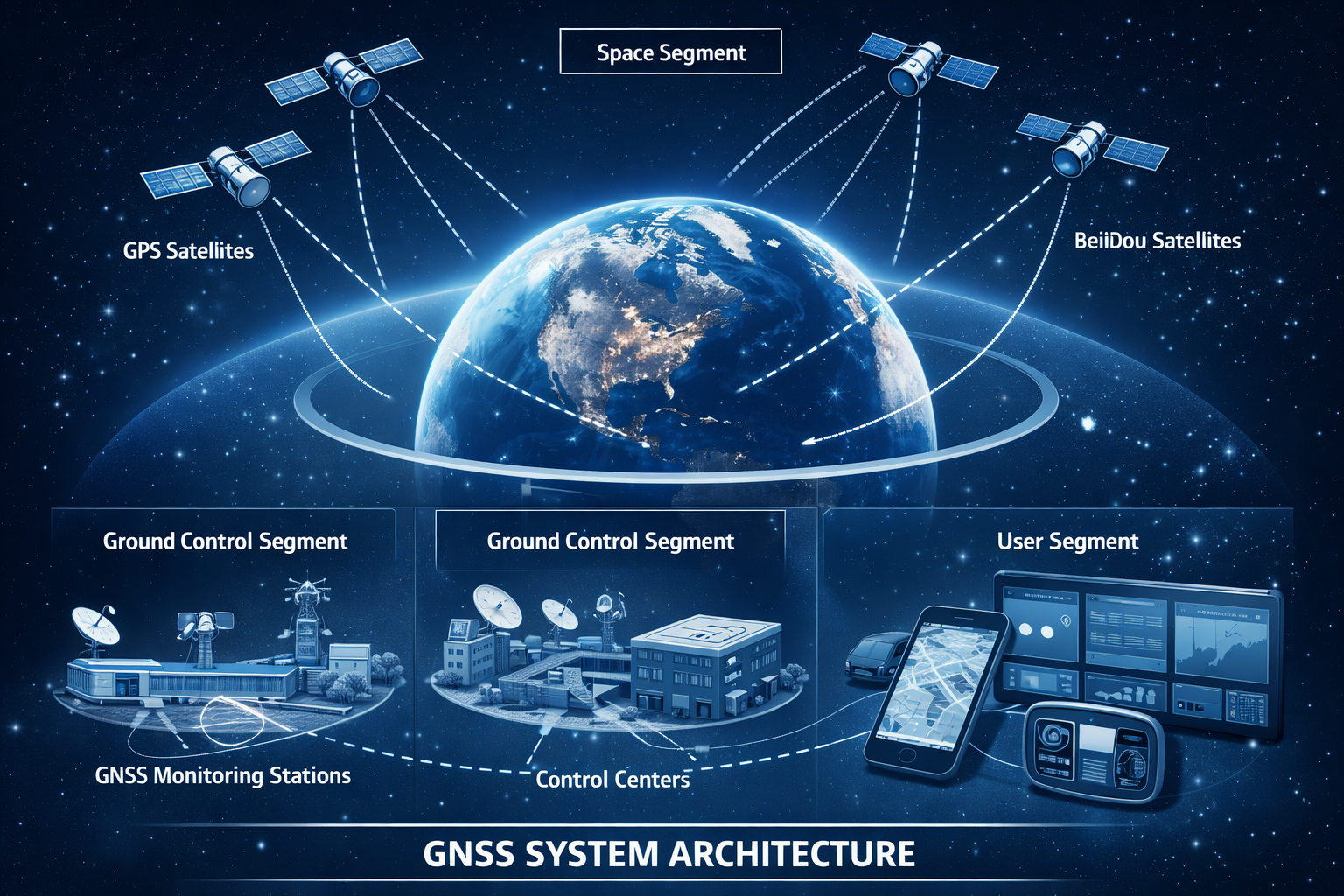
全球导航卫星系统(GNSS)通过空间段、地面控制段和用户段三部分协同工作,实现全球范围内的定位、导航与授时(PNT)服务。空间段由多颗在轨卫星组成,每颗卫星搭载高精度原子钟,在L波段发射包含导航电文与测距码的扩频信号;地面控制段负责卫星轨道确定、钟差校正与导航电文注入;用户段则通过接收机接收并处理卫星信号,解算位置、速度与时间信息。
graph TB
A[GNSS系统架构] --> B[空间段]
A --> C[地面控制段]
A --> D[用户段]
B --> E[卫星星座]
B --> F[原子钟]
B --> G[信号发射器]
E --> N[GPS/北斗/Galileo/GLONASS]
F --> O[时间同步]
G --> P[L波段信号]
N --> W[多系统兼容]
O --> X[时间基准]
P --> Y[扩频码]
C --> H[监测站]
C --> I[主控站]
C --> J[上行站]
H --> Q[轨道监测]
I --> R[轨道预报]
J --> S[电文注入]
Q --> Z[精密轨道]
R --> AA[导航电文]
S --> AA
D --> K[接收机]
D --> L[天线]
D --> M[处理单元]
K --> T[信号捕获]
L --> U[信号接收]
M --> V[位置解算]
T --> AB[相关运算]
U --> AB
Y --> AD[测距码]
AA --> AD
AB --> AE[伪距观测]
AD --> AE
AE --> AC[PVT输出]
V --> AC
1.2 伪距观测方程与位置解算
GNSS定位的核心是”测距 + 解算”。卫星在已知轨道与钟差模型下广播导航电文,并在L波段发射扩频码。接收机通过相关运算获得每颗卫星的码相位与载波多普勒,形成伪距与伪距率观测。至少四颗卫星即可同时解算三维位置与接收机钟差。
伪距观测方程可表示为:
\[\rho_i = |\mathbf{r}_i - \mathbf{r}| + c(\delta t - \delta t_i) + I_i + T_i + \epsilon_i\]其中,ρ_i 为第 i 颗卫星的伪距观测值,r_i 为卫星位置向量,r 为接收机位置向量,c 为光速,δt 为接收机钟差,δt_i 为卫星钟差,I_i 为电离层延迟,T_i 为对流层延迟,ε_i 汇集多路径、热噪声、硬件偏差与建模误差。
接收机通过最小二乘或卡尔曼滤波等方法,利用多颗卫星的伪距观测值,求解接收机位置与钟差。定位精度取决于卫星几何分布(DOP值)、信号质量(C/N0)、观测误差建模精度以及多系统融合策略。
1.3 融合定位架构(GNSS + 辅助定位)
在智能手机与车载导航中,GNSS通常与蜂窝/Wi-Fi定位、IMU(惯性测量单元)、地图匹配共同构成融合定位系统。当GNSS可用性突降时,应用层的表现往往是:位置更新率下降、地图匹配失败、跳到粗定位结果、或在惯导漂移下逐步偏离道路。
graph TB
A[融合定位系统] --> B[GNSS定位]
A --> C[蜂窝定位]
A --> D[Wi-Fi定位]
A --> E[IMU惯导]
A --> F[地图匹配]
B --> I{GNSS可用?}
I -->|是| J[高精度定位]
I -->|否| K[降级到辅助定位]
K --> L[精度下降]
K --> M[更新率降低]
B --> G[位置融合]
C --> G
D --> G
E --> G
F --> G
J --> G
G --> H[最终位置输出]
协会关于”离线地图不能替代定位信号来源”的解释,本质上就是这一层级解耦关系:离线地图仅提供道路网络与兴趣点信息,但位置坐标仍需依赖GNSS或其他定位源提供。
二、各GNSS系统信号与抗干扰能力要点对比
2.1 频点与互操作格局(决定”为何会同步受影响”)
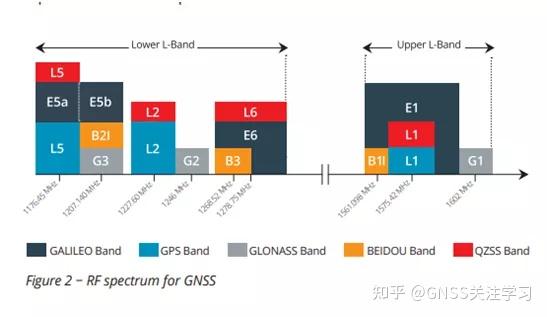
现代GNSS在民用频段上高度互操作,典型中心频率形成”共振点”。下表列出了主要GNSS系统的频点分配:
| 频段族 | 代表中心频率 | GPS | 北斗BDS | Galileo | GLONASS | QZSS/NavIC |
|---|---|---|---|---|---|---|
| L1/E1/B1 | 1575.42 MHz | L1 C/A, L1C | B1C | E1 | L1(FDMA邻近) | QZSS L1, NavIC(无L1) |
| L5/E5a/B2a | 1176.45 MHz | L5 | B2a | E5a | — | QZSS L5, NavIC L5 |
| L2/E5b/B2 | 1227.60 / 1207.14 MHz | L2C(1227.60) | B2I(1207.14) | E5b(1207.14) | L2(FDMA邻近) | QZSS L2C |
| E6/B3 | 1278.75 / 1268.52 MHz | — | B3I | E6 | — | QZSS L6(1278.75) |
上述信号体制与频率分配可在各系统公开接口控制文件(ICD/SIS ICD)与官方资料中查证。
由此可以解释南京事件里”北斗与GPS同步异常”的最低成本机理:只要区域内存在覆盖L1/E1/B1邻域的干扰,单频手机与大量民用终端会同时失去可用观测;而”兼容互操作”越强,越容易出现”跨系统同损”的体感。这也与协会”精准针对北斗、GPS民用频段”的表述一致。
2.2 民用侧”抗干扰/抗欺骗”能力主要靠什么
民用GNSS的抗干扰不是单点能力,而是系统设计与接收机实现共同决定,关键抓手包括:
第一类是信号结构层面的”可跟踪性与鲁棒性”。更高码率、更强导频分量、更合理的BOC/AltBOC类调制,有利于提升捕获/跟踪门限并改善多路径分离(但对强干扰的免疫仍有限)。公开ICD给出了调制、码率与电文结构,是工程实现的依据。
第二类是多频多系统冗余。双频(如L1+L5)能用电离层无关组合提高精度,同时在”单频受损”时保留一定可用性;多星座可在几何上提供冗余,降低DOP与失锁概率。但当干扰覆盖多个共用频段时,这种收益会显著下降。
第三类是认证与反欺骗机制。Galileo已推动开放服务导航电文认证OSNMA并在2025年进入正式服务阶段,允许用户验证电文真实性,从而提升对欺骗的可检测性(但不能防止压制式干扰)。从研究与工程趋势看,”信号/电文认证 + 接收机内生检测(SQM、相关畸变、钟差一致性)+ 多源融合一致性校验”正在成为主流反欺骗路线。
OSNMA(Open Service Navigation Message Authentication)作为首个全球部署的GNSS开放服务认证机制,其实际部署效果与性能评估已成为近期研究热点。根据欧盟空间计划署的官方发布,OSNMA在2025年正式进入服务阶段后,已在多个关键基础设施场景中验证了其反欺骗能力(European Union Agency for the Space Programme, 2025)。研究表明,OSNMA能够有效检测导航电文篡改与重放攻击,但对于压制式干扰(jamming)则无法提供保护。王晓燕等人(2023)在综述中系统梳理了GNSS干扰与欺骗检测的研究现状,指出信号质量监控(SQM)、相关峰畸变检测、钟差一致性校验等接收机内生检测方法,与OSNMA等外部认证机制相结合,构成了当前最有效的反欺骗技术路线。
第四类是接收机抗干扰实现。包括自适应陷波、时频域脉冲抑制、AGC协同、阵列天线零陷、以及与IMU的紧组合/超紧组合。相关方法在近年来大量论文与数据集工作中被系统化评估。
近年来,基于机器学习的GNSS干扰检测方法取得了显著进展。Jiang等人(2025)提出的ACSNet深度神经网络模型,能够有效识别复合GNSS干扰信号,在低干扰信噪比条件下仍能实现高精度的干扰分类。该模型通过多尺度特征提取与时频域分析相结合,显著提升了复杂干扰环境下的检测性能。Kesić等人(2025)开发的深度时序图网络(Deep Temporal Graph Networks)方法,能够实时修正GNSS干扰引起的定位偏差,通过图神经网络建模接收机与卫星之间的时空关系,在干扰环境下仍能维持较高的定位精度。Hussain等人(2025)提出的基于字典的对比学习方法,特别适用于资源受限的接收机平台,通过轻量级模型实现高效的干扰检测,为低成本GNSS干扰监测网络提供了技术基础。
graph TB
A[GNSS抗干扰/抗欺骗机制] --> B[信号结构层面]
A --> C[多频多系统冗余]
A --> D[认证与反欺骗]
A --> E[接收机实现]
B --> F[高码率扩频]
B --> G[BOC/AltBOC调制]
B --> H[导频分量]
F --> T[提升捕获门限]
G --> T
H --> T
C --> I[双频组合]
C --> J[多星座融合]
C --> K[几何冗余]
I --> U[电离层无关]
J --> V[降低DOP]
K --> V
D --> L[OSNMA认证]
D --> M[SQM检测]
D --> N[相关峰畸变检测]
D --> O[钟差一致性校验]
L --> W[电文真实性验证]
M --> X[信号质量监控]
N --> X
O --> X
E --> P[自适应陷波]
E --> Q[时频域脉冲抑制]
E --> R[阵列天线零陷]
E --> S[IMU紧组合]
P --> Y[抑制窄带干扰]
Q --> Y
R --> Z[空间滤波]
S --> AA[GNSS失效时保持定位]
三、GNSS异常与干扰形式全景(面向”可用性”与”真实性”两大问题)
3.1 非蓄意类异常(常被误认为”被干扰”)
城市峡谷多路径、遮挡导致的C/N0波动与伪距偏差,通常表现为”在高楼密集区漂移、路口跳点、速度方向不稳”;电离层闪烁会导致相位快速扰动、失锁增多,但其空间尺度与时间尺度更接近电离层天气过程,往往不是”某一城某一时段突然集体失灵后又快速恢复”的形态。
因此,南京事件若呈现”同一晚高强度爆发+较快恢复”,更像RF环境被外部因素改变,而非自然误差项主导。
3.2 蓄意/人为类异常(本报告重点)
从影响机理看可分为两大类:
其一是压制式干扰(jamming / denial)。目标是让接收机”听不见”或”听不清”真信号,典型后果是C/N0整体下跌、跟踪环失锁、PVT不可用或降级。协会对南京事件的定性属于这一类。
其二是欺骗式干扰(spoofing / manipulation)。目标是让接收机”听见一个更像真信号的假信号”,从而输出错误PVT。欺骗往往更隐蔽,接收机可能仍显示”有卫星、有信号”,但位置被平滑牵引或突然跳变。近年来研究集中在用SQM、相关峰畸变、钟差/多普勒一致性、以及认证机制(如OSNMA)进行检测。
两者可以组合出现(先压制再牵引),这也是航空界与国际组织反复强调的高风险模式之一。
graph TB
A[GNSS干扰分类] --> B[非蓄意异常]
A --> C[蓄意/人为异常]
B --> D[多路径效应]
B --> E[电离层闪烁]
B --> F[对流层延迟]
B --> G[遮挡效应]
C --> H[压制式干扰Jamming]
C --> I[欺骗式干扰Spoofing]
C --> J[组合攻击]
H --> K[C/N0下降]
H --> L[跟踪环失锁]
H --> M[PVT不可用]
K --> R[定位失败]
L --> R
M --> R
I --> N[位置被牵引]
I --> O[时间同步错误]
I --> P[隐蔽性强]
N --> S[错误导航]
O --> S
P --> T[难以检测]
J --> Q[先压制再欺骗]
Q --> U[高风险模式]
3.3 干扰对接收机底层指标的影响
从接收机信号处理链路看,干扰会在不同层级产生可观测的异常指标:
物理层指标。载噪比(C/N0)是衡量信号质量的核心指标。压制式干扰会导致C/N0整体下跌,典型情况下从正常值(35-50 dB-Hz)降至20 dB-Hz以下,甚至低于跟踪门限。自动增益控制(AGC)值也会异常升高,反映接收机前端为补偿干扰而增大增益。巴晓辉等人(2025)提出的基于深度残差神经网络的GNSS接收机干扰抑制方案,能够通过实时监测C/N0与AGC的变化模式,识别线性调频干扰等复杂干扰类型,并自适应调整接收机参数以维持信号跟踪。该方法在强干扰环境下仍能保持较高的信号捕获与跟踪性能,为城市GNSS干扰监测提供了重要的技术支撑。
信号处理层指标。跟踪环失锁标志、可用卫星数、每频点跟踪状态等,可直接反映干扰对信号捕获与跟踪的影响。压制式干扰通常表现为多颗卫星同时失锁,可用卫星数从8-12颗骤降至0-2颗。
定位解算层指标。位置精度因子(DOP)异常增大、PVT解算失败率上升、位置更新率下降。在GNSS完全失效时,融合定位系统会降级到蜂窝/Wi-Fi粗定位,精度从米级降至数十米甚至百米级。
3.4 干扰对用户端体验的影响
GNSS干扰对用户端体验的影响呈现明显的层级传递效应:
导航应用层。定位漂移、地图匹配失败、路线规划错误。用户可能看到”当前位置”在地图上跳跃,或显示在”无数据道路”区域。导航语音提示可能延迟或错误。
共享出行服务。共享单车无法正常解锁或还车,系统判定用户超出运营范围;网约车定位异常,司机与乘客位置不匹配,导致接单失败或绕路。
物流配送服务。外卖骑手定位漂移,导致订单超时;快递配送路径规划错误,影响配送效率。
时间同步服务。依赖GNSS授时的系统可能出现时间偏差,影响金融交易、通信网络等关键应用。
graph TB
A[GNSS干扰] --> B[接收机层]
A --> C[应用层]
B --> D[C/N0下降]
B --> E[失锁增多]
B --> F[PVT失败]
D --> K[信号质量恶化]
E --> L[可用卫星减少]
F --> M[定位不可用]
K --> N[降级到辅助定位]
L --> N
M --> N
C --> G[导航异常]
C --> H[共享出行故障]
C --> I[物流配送延误]
C --> J[时间同步错误]
N --> O[精度下降]
N --> P[更新率降低]
O --> G
P --> G
G --> Q[用户体验下降]
H --> Q
I --> Q
J --> Q
四、南京2025-12-17 GNSS异常事件的证据链与机理化归因
4.1 公开信息层面的”已知事实”
南京卫星应用行业协会在公开文本中给出了三个关键判断:
第一,核心原因是GNSS卫星信号受到临时干扰压制,而非通信网络中断,因此离线地图无效。这一判断明确了问题的本质:GNSS信号层面的干扰,而非应用层或网络层故障。
第二,干扰”精准针对北斗、GPS民用频段”,导致多应用同时异常。这表明干扰源具有明确的频段选择性,而非全频段覆盖,符合”临时性RF管控设备”的特征。
第三,若为重大活动安保所需的临时信号管控,属于常规手段,活动结束后逐步恢复。这一表述暗示了事件的可能背景:2025年12月16日至17日,两岸企业家峰会年会在南京举行,规格极高,多国政商要员出席。在活动结束后的关键时段,可能启动了干扰设备,导致导航信号异常。
这三点共同指向”区域性、时间受控、以民用GNSS频段为对象的压制式干扰”。
4.2 用户反馈收集与分析
通过广泛收集网络用户反馈与媒体报道,本次事件的主要用户端表现包括:
时间特征。事件集中发生在2025年12月17日18:00至22:00期间,22:00后导航功能逐渐恢复正常。这一时间窗口与重大活动结束时间高度吻合。
空间特征。影响范围主要集中在南京部分区域,而非全市或更大范围。部分用户反映在新街口、河西等核心区域受影响更明显。
应用层表现。
手机导航。定位漂移严重,有用户反映”人在新街口,定位却显示在汤山”(距离约30公里),或显示在”无数据道路”区域。
共享单车。无法正常解锁或还车,系统提示”超出运营范围”,即使车辆实际位于运营区域内。
外卖服务。配送员定位异常,导致订单超时。有骑手反映导航路线错误,绕路严重。
网约车。司机与乘客位置不匹配,接单失败或需要电话沟通确认位置。
技术特征。多款导航应用(高德地图、百度地图、腾讯地图等)同时出现异常,表明问题出在底层GNSS信号接收,而非单一应用故障。
4.3 从接收机与应用层表现反推”最可能的干扰类型”
在不引入任何”如何实施干扰”的细节前提下,仍可基于现象做工程级反推:
如果是压制式干扰主导,那么手机/车机将出现”定位不可用或更新率大幅下降”,随后应用退化到蜂窝/Wi-Fi粗定位与IMU漂移,地图匹配失败概率升高,于是出现”无数据道路、共享单车超范围、外卖延时”等二次效应。这条链条与协会对”离线地图无效”的强调是同一逻辑闭环。
如果是欺骗式干扰主导,那么更典型的用户侧体验是”仍能持续定位但位置被系统性牵引”,并可能伴随时间/速度/航向的物理不一致。仅凭”曾跳到某个远处点位”的个案,难以排除这是融合定位的失败模式(例如Wi-Fi指纹误匹配、基站定位漂移、地图匹配回退)而非真实欺骗。
因此,本事件在证据不足以支持”欺骗主导”的情况下,最稳健的结论是:以”压制式干扰导致GNSS可用性骤降”为主因;是否存在欺骗成分,需要接收机底层观测与频谱证据才能判断。
4.4 “为何会同时影响北斗与GPS”的频谱机理
协会文本提到北斗民用频段与GPS兼容互操作,意味着对某些共用频段的干扰会造成同步影响。这一点从公开ICD的频点设计即可得到直接解释:在1575.42 MHz附近存在多系统叠加(GPS L1、Galileo E1、北斗B1C、QZSS L1)。
因此,”跨系统同步异常”是频谱互操作下的自然结果,并不自动指向”特定国家或境外势力”。只要干扰源覆盖L1/E1/B1频段,所有依赖该频段的民用终端都会受到影响,无论其优先使用GPS还是北斗。
graph TB
A[干扰源] --> B[L1/E1/B1频段1575.42 MHz]
B --> C[GPS L1 C/A]
B --> D[GPS L1C]
B --> E[北斗B1C]
B --> F[Galileo E1]
B --> G[QZSS L1]
C --> H[单频手机]
D --> H
E --> H
F --> I[多频接收机]
G --> I
H --> J[同时受影响]
I --> K[部分频段受影响]
J --> L[跨系统同步异常]
K --> M[降级到其他频段]
4.5 事件最可能原因(概率排序与依据)
在当前公开信息约束下,对”南京事件原因”给出工程概率排序:
最高概率(约75-85%):临时性RF管控引发的民用GNSS频段压制式干扰
支持证据。
- 协会公开文本的直接定性:”GNSS卫星信号受到临时干扰压制”
- 时间特征高度吻合:事件发生时段(18:00-22:00)与重大活动结束时间一致
- 空间特征符合:影响集中在部分区域,符合定向干扰或有限覆盖范围
- 恢复特征:22:00后逐步恢复,符合”活动结束、干扰撤除”的逻辑
- 频段选择性:精准针对民用频段,军用频段不受影响,符合”临时性管控设备”的设计目标
技术机理。临时性GNSS干扰设备(通常用于防范无人机等安全威胁)通过发射强电磁信号,压制L1/E1/B1频段,使依赖该频段的民用终端无法正常接收卫星信号。设备功率与覆盖范围可根据需求调整,通常在数公里范围内有效。

中等概率(约10-20%):非预期的人为干扰扩散
支持证据。
- 城市电磁环境复杂,可能存在其他射频设备在特定时段开启
- 邻频外泄或互调产物可能落入RNSS频段
- 某些工业设备或通信基站的异常运行可能产生干扰
技术机理。某类射频设备(如大功率通信设备、工业控制系统、医疗设备等)在特定时段开启,其谐波、互调产物或邻频泄漏落入1575.42 MHz附近,导致GNSS信号被压制。此类情况需要频谱记录才能区分于”有意压制”。
限制因素。无意干扰通常影响范围较小,且不会在特定时间段内集中爆发,与本次事件的时空特征不完全吻合。
较低概率(约5-10%):以欺骗为主导的攻击
支持证据。
- 部分用户反映”位置跳到远处”,可能符合欺骗的特征
- 但缺乏”连续可用但被稳定牵引”的底层证据
技术机理。欺骗式干扰通过发送伪造的GNSS信号,诱导接收机计算出错误位置。但典型的欺骗攻击需要更复杂的信号生成与同步机制,且通常伴随”信号强但不可信”的一致性破坏(如相关峰畸变、钟差一致性破坏、OSNMA/NMA异常等)。
限制因素。若没有接收机底层观测(相关峰形、钟差一致性、OSNMA验证结果等),难以将”位置跳变”与”融合定位失败”区分开来。当前前沿更倾向于把OSNMA等机制作为”可验证的反欺骗证据源”。
极低概率(<5%):GNSS系统自身故障或自然因素
支持证据。缺乏相关证据支持。
限制因素。若为系统故障,影响范围应更广(全球或区域),且持续时间更长;若为自然因素(如电离层闪烁),空间尺度与时间尺度更接近天气过程,不会呈现”某一城某一时段突然集体失灵后又快速恢复”的形态。
graph TB
A[南京GNSS异常事件] --> B[最高概率75-85%]
A --> C[中等概率10-20%]
A --> D[较低概率5-10%]
A --> E[极低概率<5%]
B --> F[临时性RF管控]
F --> J[重大活动安保]
F --> K[防范无人机]
C --> G[非预期干扰扩散]
G --> L[工业设备干扰]
G --> M[通信基站异常]
D --> H[欺骗式攻击]
H --> N[伪造信号]
E --> I[系统故障/自然因素]
I --> O[全球影响]
I --> P[持续异常]
五、如何把结论从”合理解释”升级为”可验证事实”
5.1 最小证据集(拿到就能定性)
第一组证据是接收机观测。记录C/N0时间序列、AGC、失锁标志、可用卫星数、以及每频点跟踪状态。压制式干扰通常表现为C/N0整体下跌与失锁增多;欺骗更可能出现”信号强但不可信”的一致性破坏。
第二组证据是频谱快照。用合规的监测手段在事件窗口对RNSS频段做能量谱与时频图,可直接判断是宽带抬噪、窄带载波、扫频、脉冲等哪一类干扰形态。频谱分析可以区分”有意压制”与”无意干扰”,并估算干扰源功率与大致方向。
第三组证据是多点联合。在城市多点布设低成本RFI探头,做空间插值与时变场重建,区分”单源强干扰”与”多源分布式干扰”。通过多点联合观测,可以估算干扰源的大致位置、覆盖范围与功率分布。
第四组证据是多源PNT一致性校验。对比GNSS定位结果与蜂窝定位、Wi-Fi定位、IMU推算结果,当GNSS被干扰时,多源定位结果会出现明显不一致。这种不一致性可以作为干扰检测的辅助指标。
5.2 可复现的数据处理脚本(Python示例,偏防御)
下面示例只用于把”接收机日志”转为可审计的异常检测指标,不涉及任何发射或攻击细节。
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
from datetime import datetime, timedelta
# 假设你有接收机导出的观测日志,包含 time, band, cn0, tracking_state, agc 等字段
df = pd.read_csv("gnss_log.csv", parse_dates=["time"])
# 1) 以band分组,计算C/N0滚动中位数与突降检测
df = df.sort_values("time")
df["cn0_med_60s"] = df.groupby("band")["cn0"].transform(
lambda s: s.rolling(60, min_periods=20).median()
)
df["cn0_drop"] = df["cn0_med_60s"] - df["cn0"]
# 2) 统计失锁率
df["loss_of_lock"] = (df["tracking_state"] == "LOSS").astype(int)
lol = df.groupby(pd.Grouper(key="time", freq="1min"))["loss_of_lock"].mean().rename("lol_rate")
# 3) 异常窗口输出
anomaly = df[df["cn0_drop"] > 8] # 阈值需按设备标定
print("suspect_minutes:", lol[lol > 0.2].index[:10])
print("suspect_samples:", anomaly[["time","band","cn0","cn0_med_60s","agc"]].head(20))
# 4) 可视化C/N0时间序列
fig, axes = plt.subplots(2, 1, figsize=(12, 8))
for band in df["band"].unique():
band_data = df[df["band"] == band]
axes[0].plot(band_data["time"], band_data["cn0"], label=band, alpha=0.7)
axes[0].set_ylabel("C/N0 (dB-Hz)")
axes[0].set_title("C/N0 Time Series")
axes[0].legend()
axes[0].grid(True)
axes[1].plot(lol.index, lol.values, label="Loss of Lock Rate")
axes[1].set_xlabel("Time")
axes[1].set_ylabel("Loss of Lock Rate")
axes[1].set_title("Loss of Lock Rate Over Time")
axes[1].legend()
axes[1].grid(True)
plt.tight_layout()
plt.savefig("gnss_anomaly_analysis.png", dpi=300)
若要做实时、低延迟的城市级监测(例如对多路I/Q流进行在线时频检测、异常聚类与告警),建议用C++(或C/CUDA)实现核心流水线:原因在于I/Q吞吐与FFT/滤波属于高带宽数值工作负载,Python在低延迟场景下更适合作为编排层与离线分析层。
5.3 城市级GNSS干扰监测系统架构
构建城市级GNSS干扰监测系统,需要多层次、多手段的协同。根据国际民用航空组织发布的GNSS射频干扰影响及缓解措施指南,城市级监测网络应包含高性能接收机、低成本RFI探头与频谱监测站三类设备,形成”点-线-面”相结合的监测体系(International Civil Aviation Organization, 2024)。高性能接收机部署在关键基础设施节点,提供高精度的C/N0、AGC与失锁标志观测;低成本RFI探头广泛布设于城市各区域,实现能量谱的连续监测;频谱监测站则负责对RNSS频段进行深度分析,识别干扰类型与估算干扰源位置。通过多源数据融合与机器学习算法,系统能够实时检测干扰事件、评估影响范围并触发应急响应。
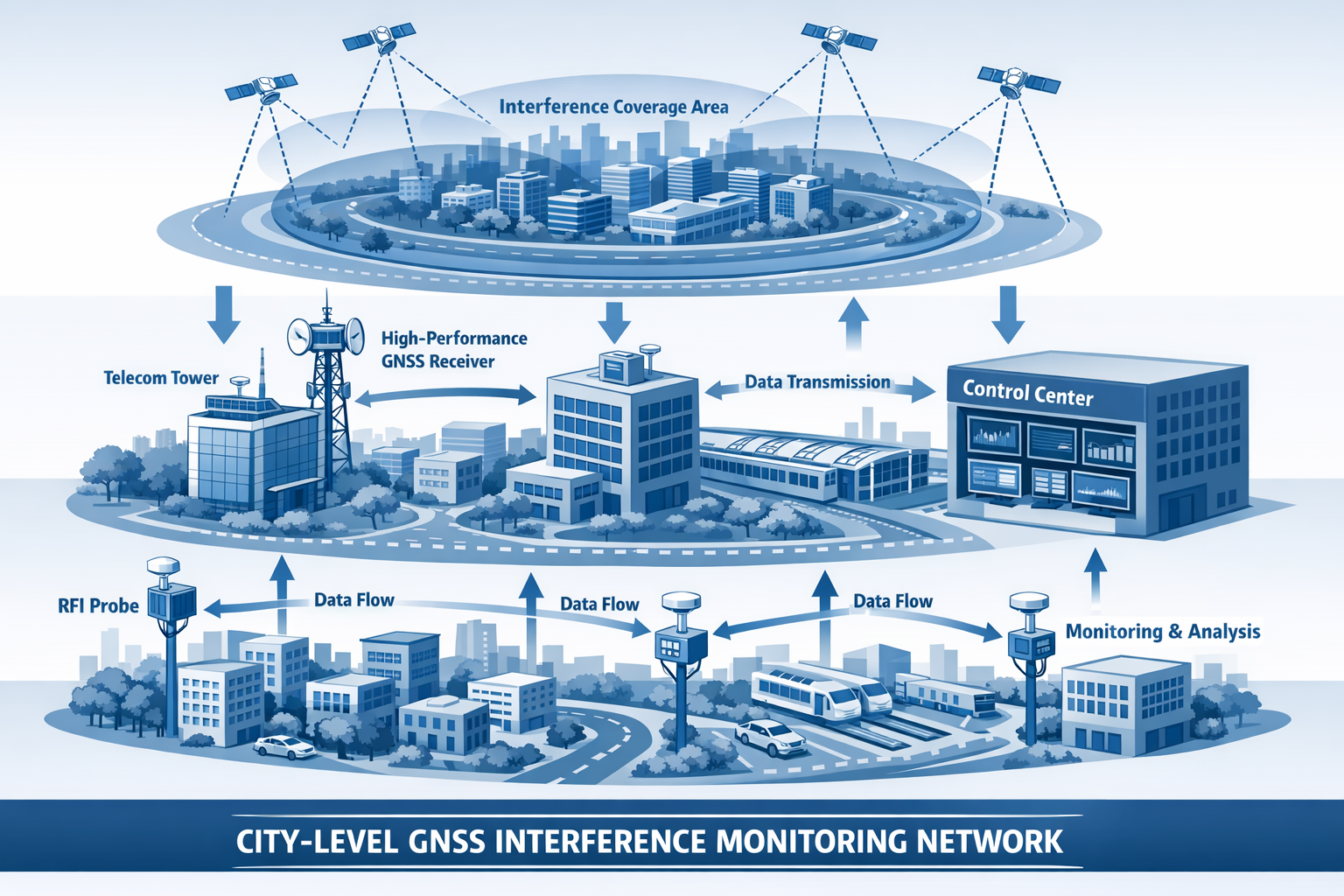
构建城市级GNSS干扰监测系统,需要多层次、多手段的协同:
graph TB
A[城市级GNSS干扰监测系统] --> B[数据采集层]
A --> C[数据处理层]
A --> D[分析决策层]
A --> E[预警响应层]
B --> F[高性能接收机]
B --> G[低成本RFI探头]
B --> H[频谱监测站]
F --> Q[C/N0/AGC观测]
G --> R[能量谱监测]
H --> S[频谱快照]
C --> I[实时信号处理]
C --> J[异常检测算法]
C --> K[数据融合]
I --> T[时频分析]
J --> U[机器学习检测]
K --> V[多源融合]
D --> L[干扰类型识别]
D --> M[源位置估计]
D --> N[影响范围评估]
L --> W[压制/欺骗分类]
M --> X[DOA估计]
N --> Y[空间插值]
E --> O[实时告警]
E --> P[应急响应]
O --> Z[通知相关部门]
P --> AA[启动应急预案]
六、工程级加固建议(面向城市出行与关键基础设施)
6.1 面向”可用性”的PNT韧性体系
建立城市级PNT韧性体系,不把GNSS当作唯一定位源。交通、物流、低空、应急等场景应默认具备GNSS失效降级策略。
多源融合定位。在关键应用中,同时使用GNSS、蜂窝定位、Wi-Fi定位、IMU、视觉定位等多种定位源,通过融合算法提高鲁棒性。当GNSS失效时,系统自动降级到其他定位源,虽然精度可能下降,但服务不中断。
惯性导航备份。在车载、无人机等移动平台中,集成高精度IMU,当GNSS失效时,通过惯性导航维持短期定位能力。结合里程计、视觉里程计等,可以延长定位可用时间。
地图匹配增强。利用高精度地图与道路网络信息,通过地图匹配算法纠正定位偏差,提高在GNSS失效时的定位可靠性。
美国与欧洲航空监管体系已把GNSS干扰作为持续风险进行资源化管理与指南化治理,其”报告—监测—缓解—备份”的框架对城市同样适用(European Union Aviation Safety Agency & International Air Transport Association, 2024; Federal Aviation Administration, 2024)。
6.2 面向”真实性”的可验证定位
推动可验证定位在关键应用落地:优先使用支持多频多系统与认证能力的接收机;在可行处引入OSNMA等开放认证机制,把”怀疑被欺骗”转化为”可密码学验证的证据”。
OSNMA认证。Galileo的开放服务导航电文认证(OSNMA)允许用户验证导航电文的真实性,从而检测欺骗攻击。在关键应用中,应优先使用支持OSNMA的接收机。
接收机内生检测。利用信号质量监控(SQM)、相关峰畸变检测、钟差一致性校验等接收机内生检测机制,实时监控信号异常。
多源一致性校验。对比GNSS定位结果与其他定位源(蜂窝、Wi-Fi、IMU)的结果,当出现明显不一致时,触发告警并降级到其他定位源。
6.3 面向”治理与合规”的标准化机制
建立干扰事件的标准化通报与归档机制,形成可追溯的事件库与统计特征;国际组织已多次强调RNSS频段干扰对航空、海事与通信的系统性风险上升,城市治理需要同频谱治理联动(International Civil Aviation Organization, 2024)。
事件报告机制。建立GNSS干扰事件的标准化报告流程,包括事件时间、地点、影响范围、用户反馈、技术指标等,形成可追溯的事件数据库。
频谱监测网络。在城市关键区域部署频谱监测站,实时监测RNSS频段的能量分布,及时发现异常干扰。
应急响应预案。制定GNSS干扰事件的应急响应预案,包括干扰源定位、影响评估、服务降级、用户通知等流程。
国际合作与信息共享。参与国际GNSS干扰监测与信息共享机制,学习先进经验,提高应对能力。
6.4 技术路线图建议
graph TB
A[技术路线图] --> B[短期1-3个月]
A --> C[中期3-12个月]
A --> D[长期1-3年]
B --> E[建立监测网络]
B --> F[制定应急预案]
B --> G[用户教育]
E --> M[低成本RFI探头]
F --> N[响应流程]
G --> O[用户指南]
C --> H[部署多源融合]
C --> I[引入OSNMA认证]
C --> J[完善事件库]
H --> P[多源定位]
I --> Q[认证接收机]
J --> R[数据分析]
D --> K[城市级PNT韧性]
D --> L[智能干扰检测]
D --> AA[自适应降级系统]
K --> S[韧性架构]
L --> T[AI检测]
AA --> U[自动切换]
结论
以现有公开信息为边界,本次南京GNSS异常事件最稳健、最符合工程机理的解释是:在特定时间窗内(2025年12月17日18:00-22:00),南京部分区域民用GNSS频段遭遇了临时压制式干扰,导致大量单频/民用终端的GNSS可用性骤降,从而触发导航、共享出行与配送平台的级联异常;这一结论与南京卫星应用行业协会公开说明一致。
主要发现。
- 干扰类型。以压制式干扰(jamming)为主,概率约75-85%,最可能源于重大活动安保所需的临时性RF管控设备。
- 影响机理。干扰覆盖L1/E1/B1频段(1575.42 MHz),导致依赖该频段的GPS、北斗、Galileo等系统同时受影响,体现了现代GNSS在民用频段上的高度互操作性。
- 用户端表现。从接收机底层(C/N0下降、失锁增多)到应用层(定位漂移、服务中断)的完整因果链,符合”GNSS失效→降级到辅助定位→精度下降→用户体验恶化”的典型模式。
- 验证需求。是否存在欺骗成分,必须依赖接收机底层观测(C/N0、AGC、相关峰形、OSNMA验证结果)与频谱证据才能进一步定性。
建议。
- 短期。建立城市级GNSS干扰监测网络,部署低成本RFI探头与高性能接收机,形成实时监测与告警能力。
- 中期。在关键应用中部署多源融合定位系统,引入OSNMA认证机制,提高PNT服务的鲁棒性与可验证性。
- 长期。构建城市级PNT韧性体系,将GNSS干扰风险纳入城市治理框架,制定标准化的事件报告、监测、缓解与备份机制。
建议用”最小证据集”在下一次类似事件中实现事实闭环,把争论从舆情层推进到可审计的技术层。同时,加强公众对GNSS干扰的认知,提高应对能力,减少对日常生活的负面影响。
参考文献
- 巴晓辉, 温雯霏, 蔡伯根, 王剑, 姜维, & 柴琳果. (2025). GNSS信号的线性调频干扰抑制方法. 系统工程与电子技术, 47(7), 2339-2348. https://www.sys-ele.com/CN/10.12305/j.issn.1001-506X.2025.07.26
- European Union Agency for the Space Programme. (2025). Galileo to be the first GNSS to offer authentication service worldwide with launch of OSNMA. EUSPA Press Release. https://www.euspa.europa.eu/pressroom/press-releases/galileo-be-first-gnss-offer-authentication-service-worldwide-launch-osnma
- European Union Aviation Safety Agency, & International Air Transport Association. (2024). EASA and IATA outline comprehensive plan to mitigate GNSS interference risks. EASA Press Release. https://www.easa.europa.eu/en/newsroom-and-events/press-releases/easa-and-iata-outline-comprehensive-plan-mitigate-gnss
- Federal Aviation Administration. (2024). GNSS Interference Resource Guide. U.S. Department of Transportation. https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/afx/afs/afs400/afs410/GNSS/GPS_GNSS_Interference_Resource_Guide.pdf
- GPS.gov. (2024). Interface Control Documents (ICDs) & Interface Specifications (ISs). U.S. Government. https://www.gps.gov/technical/icwg/
- Hussain, Z., Majal, A., Chughtai, A. H., & Nadeem, T. (2025). Dictionary-Based Contrastive Learning for GNSS Jamming Detection. arXiv preprint arXiv:2512.07512. https://arxiv.org/abs/2512.0751
- International Civil Aviation Organization. (2024). Protect satellite navigation from interference, UN agencies urge. ICAO News. https://www.icao.int/news/protect-satellite-navigation-interference-un-agencies-urge
- Jiang, M., Ye, Z., Xiao, Y., Gao, Y., Xiao, M., & Niyato, D. (2025). ACSNet: A Deep Neural Network for Compound GNSS Jamming Signal Classification. arXiv preprint arXiv:2504.10806. https://arxiv.org/abs/2504.1080
- Kesić, I., Blatnik, A., Fortuna, C., & Bertalanič, B. (2025). Deep Temporal Graph Networks for Real-Time Correction of GNSS Jamming-Induced Deviations. arXiv preprint arXiv:2509.14000. https://arxiv.org/abs/2509.14000
- 南京卫星应用行业协会. (2025年12月19日). 关于12月17日南京区域导航信号异常情况的技术性探讨分析. 每日经济新闻. https://www.nbd.com.cn/articles/2025-12-19/4188357.html
- 王晓燕, 杨晶晶, 黄铭, 吴季达, & 彭子箫. (2023). GNSS干扰和欺骗检测研究现状与展望. 信号处理, 39(12), 2131-2152. https://signal.ejournal.org.cn/cn/article/pdf/preview/10.16798/j.issn.1003-0530.2023.12.003.pdf
报告完成日期。2025年12月24日
报告性质。技术分析报告,基于公开信息与工程机理分析,不构成司法级结论